


Researchers from the University of Cambridge have deployed a fleet of 1:24 scale autonomous Range Rovers to explore how cars can communicate and work together. Results are promising, with cooperative driving improving traffic flow by 35% in normal driving operation, and a staggering 45% when driving more aggressively.
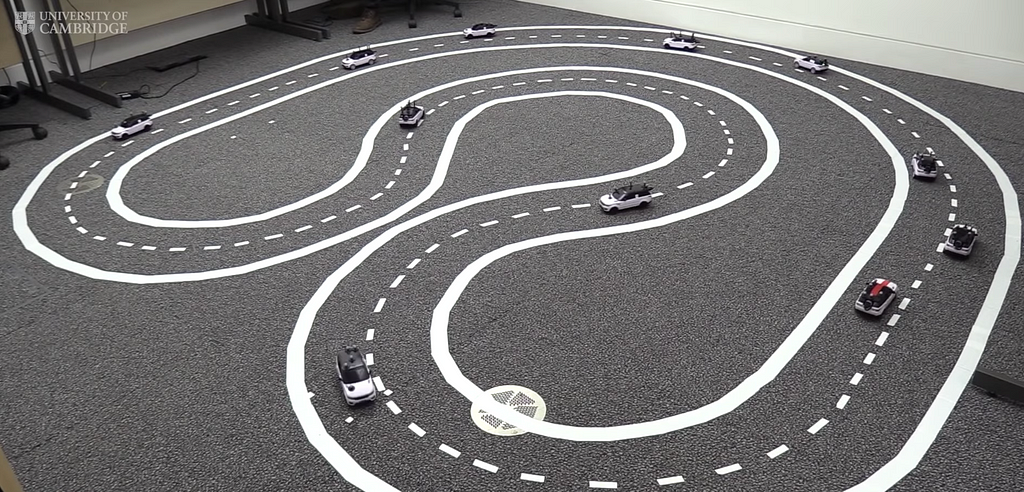
The experiment takes place on a two-lane simulated freeway marked out on a room’s floor. When properly communicating, SUVs in the right-hand lane can preemptively slow down in order to allow drivers to quickly avoid a stopped car in the left lane, avoiding the need to wait for a random gap in traffic. Driving can be further interfered with by adding a human-controlled aggressive driver, which vehicles also avoid nicely when in communication. Perhaps this improvement is also a lesson in polite and aware driving in general, though data flowing between vehicles gives such systems a vastly improved ability to react.

To accomplish this autonomous and collaborative driving simulation, each mini Rover is embedded with a Raspberry Pi Zero W and uses an L293D motor driver IC for control. While the improved traffic flow and communication is the point of the exercise, the models themselves are quite impressive, and more info on the experiment is available on the project’s research paper.
https://medium.com/media/2c51ea511369cd4131d2e2a365609433/href
[h/t: BBC]
Driverless Range Rovers Collaborate in Tiny Freeway Model was originally published in Hackster Blog on Medium, where people are continuing the conversation by highlighting and responding to this story.
Source: Driverless Range Rovers Collaborate in Tiny Freeway Model

Laisser un commentaire